《Stochastic Screen Space Reflections》阅读笔记
2015年SIGRAPH,EA提出了SSSR,用于《镜之边缘》中镜面反射
需求有
- 支持清晰(sharp)和模糊(blurry)反射
- 邻接性,越近反射越清晰(contact hardening)
- 高光拉伸
- 逐像素的粗糙度和法线
相关工作
mirror-only SSR
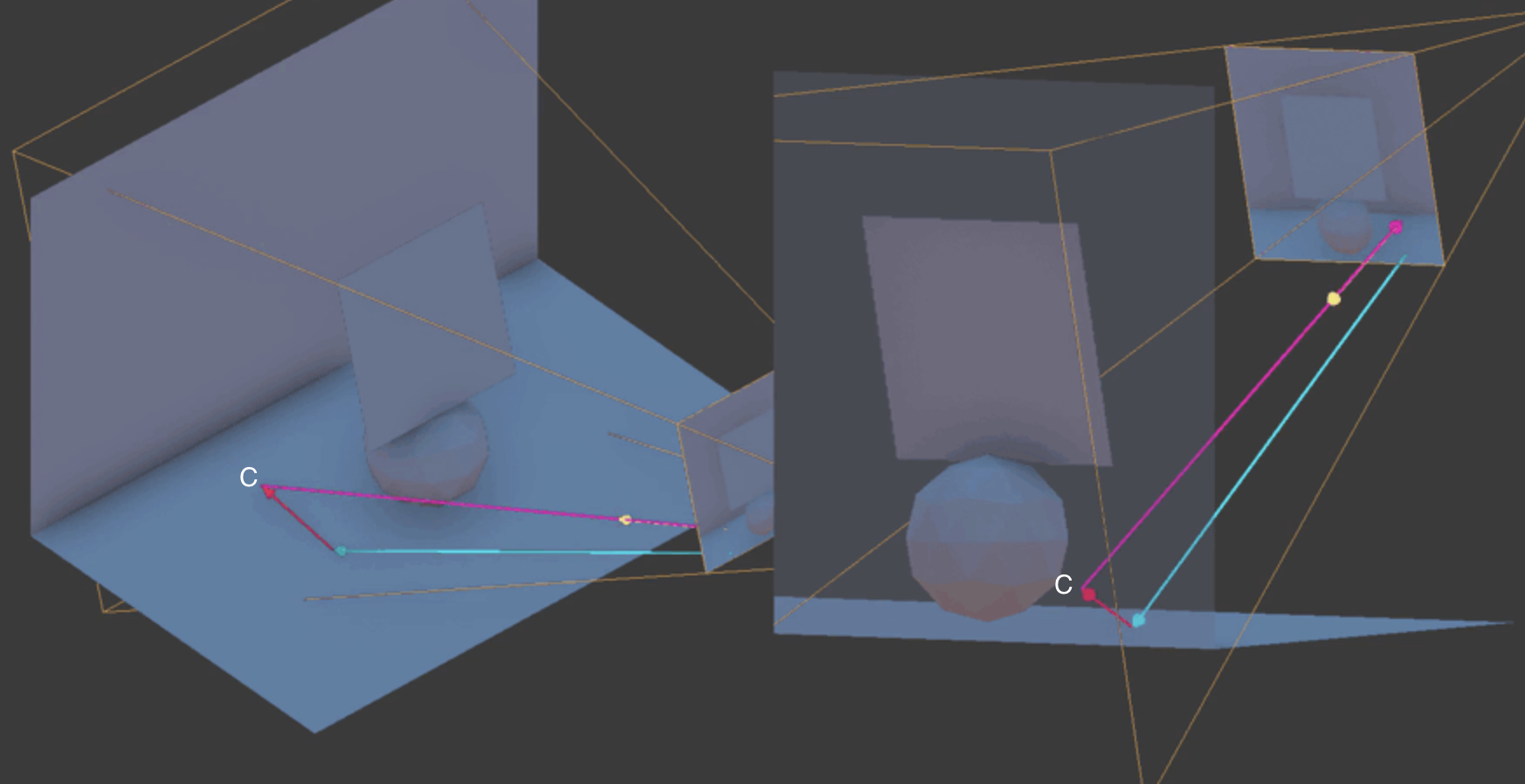
我们先回顾传统的SSR
- 从屏幕像素开始RayMarching(需要View空间的世界坐标和法线)
- 根据深度可以很轻松找到第一个落点,根据法线很容易求出反射光线的角度
- 使用简单的线性步进,求反射光线的命中点
- 反射光线向前步进一段距离,到达C点
- 通过三角形边角性质,可以求出C点距离镜头的距离,这其实就是View空间的深度
- 若C点距离镜头的距离小于等于深度,则说明命中
- 将命中位置进行透视投影,使用上一帧的渲染结果作为反射颜色
glossy SSR
模糊滤波
杀戮尖塔提供了一种glossy SSR,就是对反射像素做一次卷积模糊,但这种模糊是一视同仁的模糊,没有实现越近越清晰
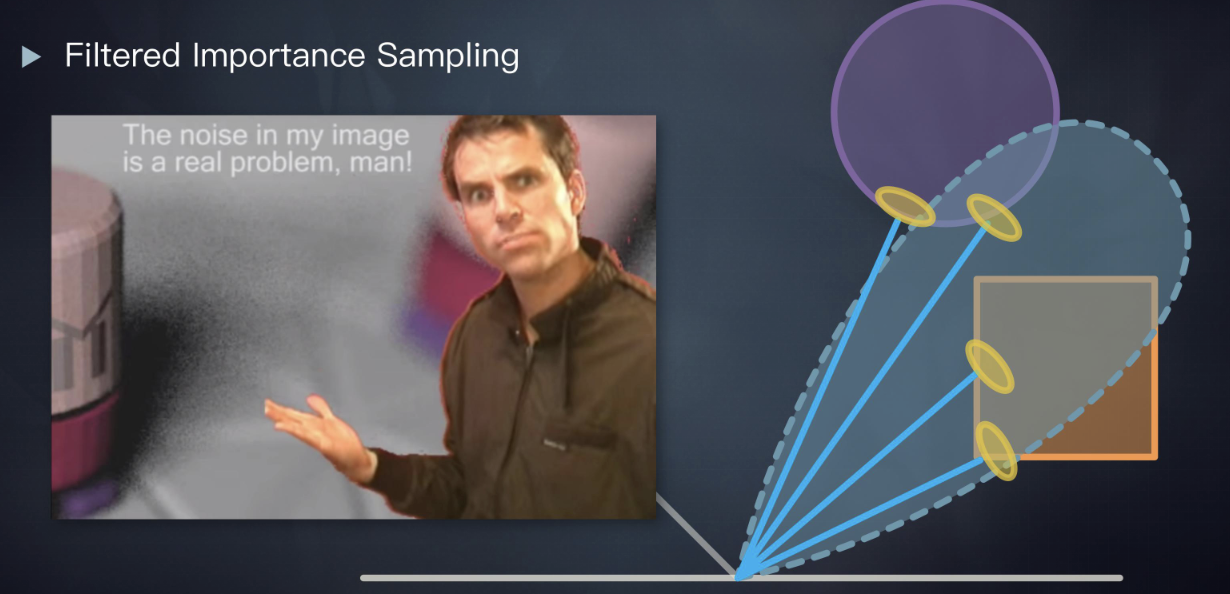
重要性采样
相对于普通的SSR,这里根据法线求反射光线方向时,加入一些随机偏差,反射光线形成了一个锥形,进而实现了模糊的SSR
当物体离反射面比较近时,根据正弦定理,滤波的像素数量更少,于是清晰度更高
但是在光线数量比较少的情况下,会有大量噪点,效果很差
作者的算法
- 将屏幕划分为Tile,进行一次低分辨率的光线步进,评估Tile的重要性,需要多少射线
- 根据材质粗糙度判断使用何种的RayMarching
- 昂贵的射线:借助Hi-Z的精确tracing,能得到准确的命中点
- 用于smooth表面
- 便宜的射线:简单的线性步进
- 用于粗糙表面(反正会做严重的滤波,不需要高精度)
- 昂贵的射线:借助Hi-Z的精确tracing,能得到准确的命中点
- 使用BRDF重要性采样决定射线方向
- 使用邻居的采样信息进行模糊
- TAA
Tile评估
- 对于每一个Tile以1/8分辨率发射射线
- 判断射线(的反射光线)是否击中
- 若所有光线都没命中,则跳过这个Tile的步进
- 根据命中的比例和命中信息的差异,判断这个Tile中的像素需要多少个光线
Hi-Z tracing
详情可以去看《GPU Pro 5》
Hi-Z使用四叉树组织屏幕深度,将层次关系存储在MipMap层级中,用于加速反射光线的求交
Hi-Z的构建时,对屏幕尺寸的深度进行滤波,每次保存2x2像素中最浅的像素,也就是说最高级别的Hi-Z存储着整张图中最浅的深度
用C点表示光线在步进过程中的头坐标,我们射线求交的原理就是判断C点距离相机的距离和该点深度图的深度关系,相交处必然是一侧比C点深,一侧比C点浅
此外还有几条经验:
- 从相机出发的射线,落点位置是View空间该方向最浅的位置
- 从相机出发的射线,与落点位置的法线夹角应该大于$45^{\circ}$
- 若夹角小于$45^{\circ}$,那么反射信息来自相机身后的内容,屏幕空间没有这些信息(可以用Cubemap补充信息)
- 若夹角大于$45^{\circ}$,那么我们基本可以认为,反射光线在步进过程中,深度在不断变深
- 我们实际寻找的是,光线在步进过程中,比C点要深的最浅位置(更深,但只能深一点点)
- 由于起初我们位于最浅的位置,而步进的光线越来越深,因此第一个min-Z小于C点深度的位置,就是交点位置,我们只需要一直向右,不用回头
- 这样得到的Mip等级比较高,我们通过降低Mip等级,每次取比C深中最浅的那一个,直到Mip为0
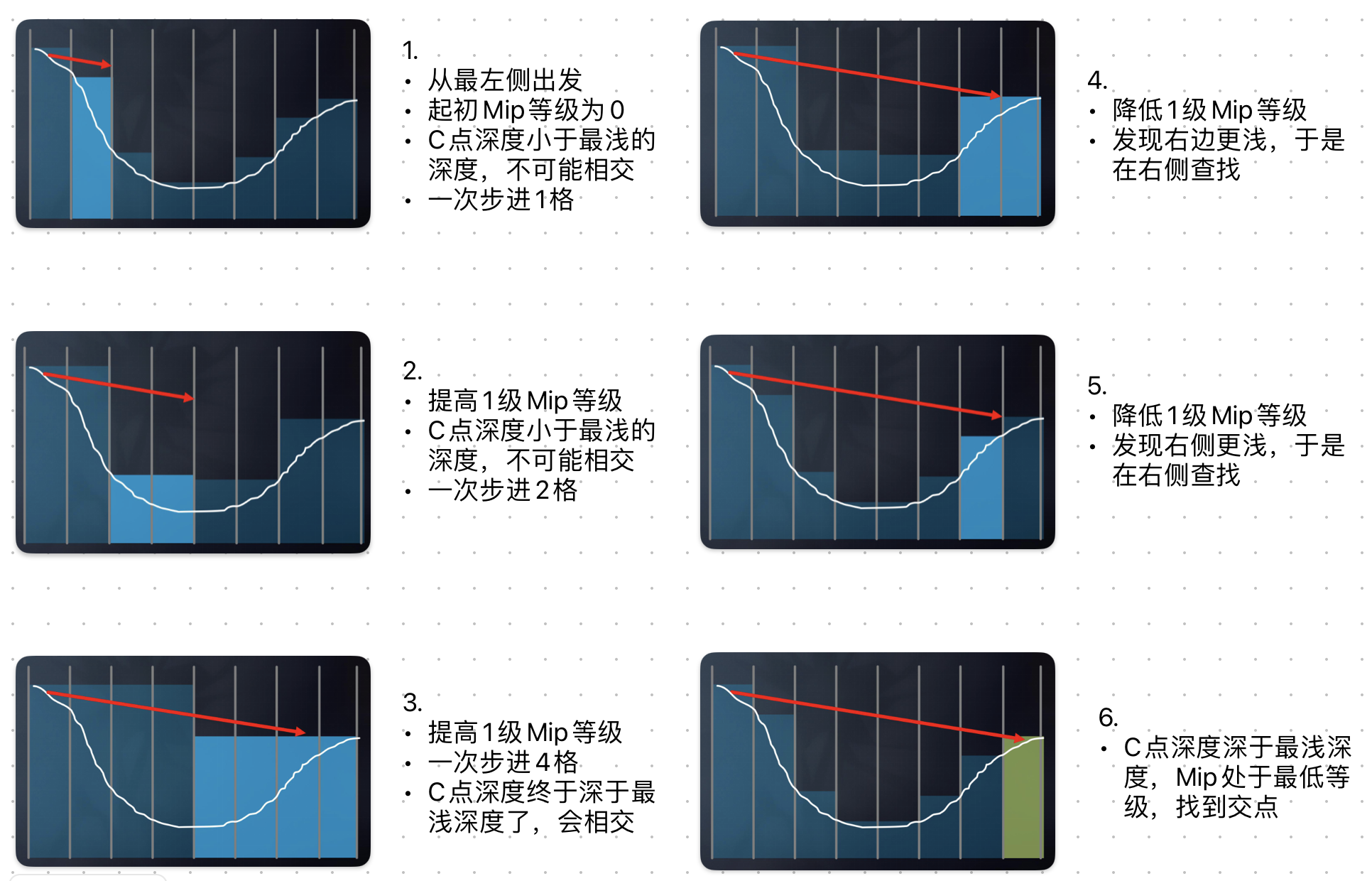
算法复杂度为$O(\log n)$
重要性采样
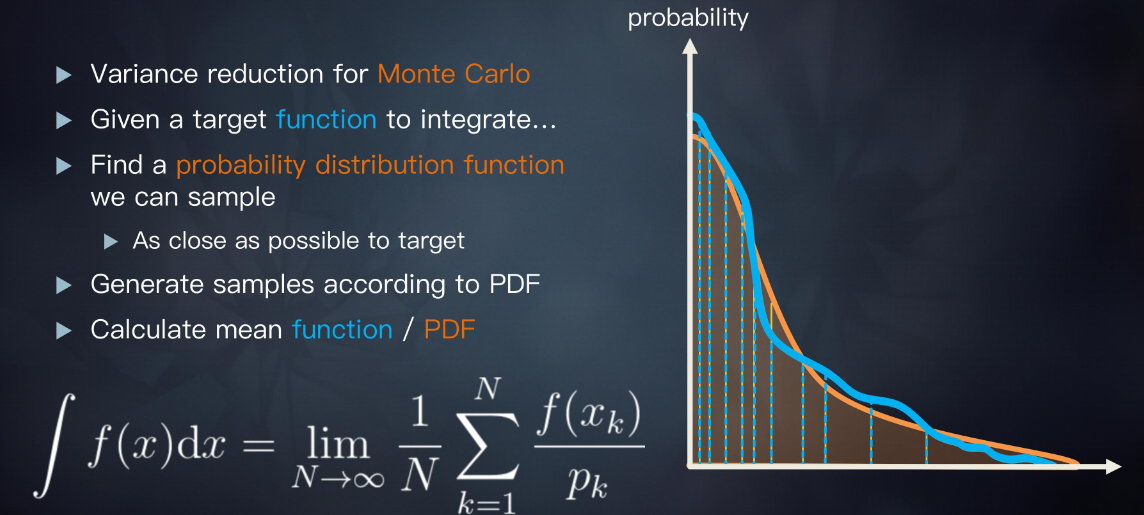
重要性采样是蒙特卡洛积分中用于减少方差的算法,详情可以去看PBRT
简单来说就是我们有一个积分,我们不得不实时求这个积分,于是我们将这个积分很多项分离出去,最后变成了 复杂离散项 x 一段简单函数的积分
蒙特卡洛积分
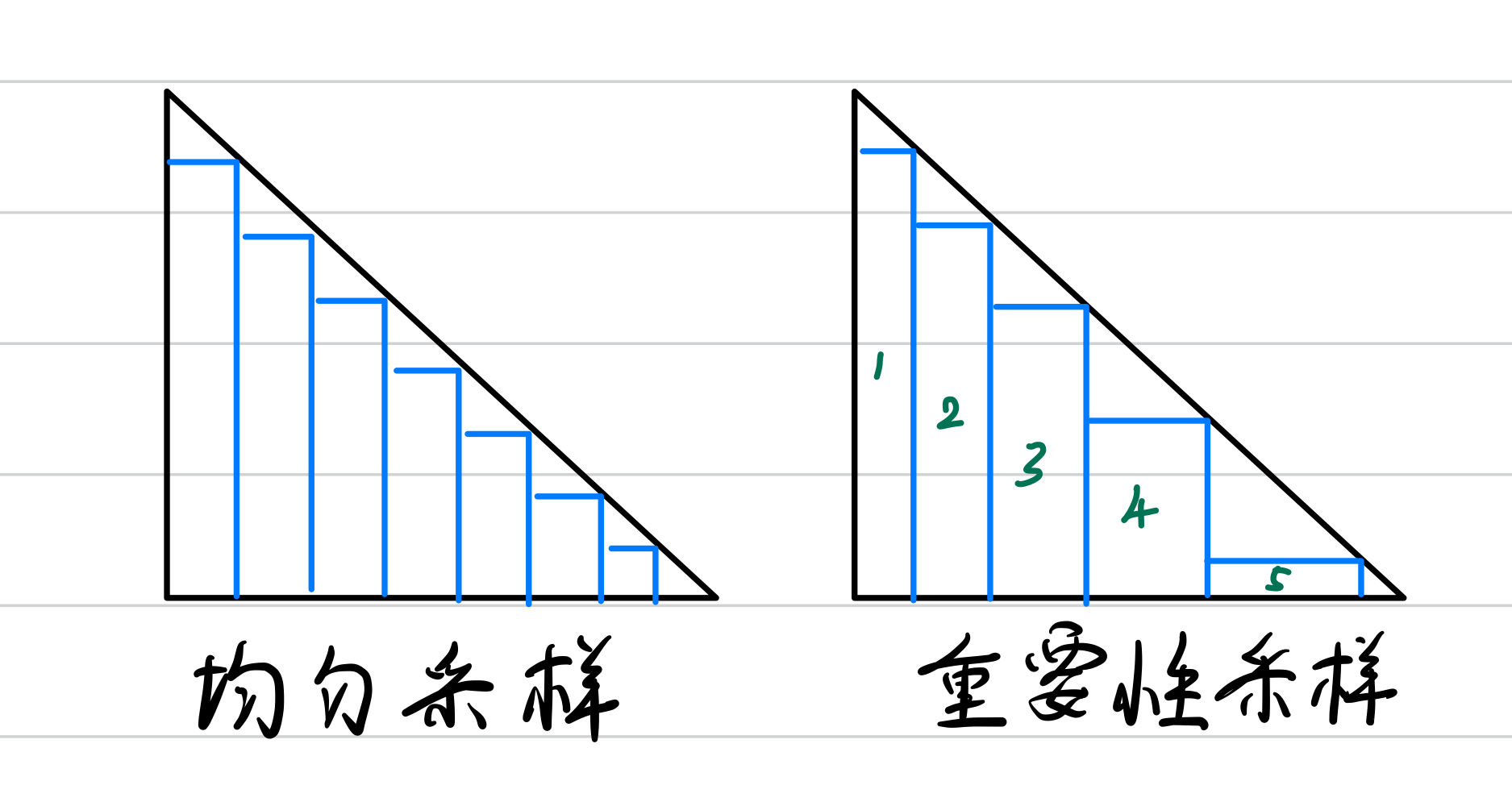
这是一个三角形,如果我们想求三角形的面积,可以对三角形的高度函数做积分
- 第一种切分方法:均匀切分,三角形被分为等宽的长方形,每个长方形长$\Delta x$,高$\sqrt{1-x^2}$
$$
S=\sum _{i=0}^N \Delta x \times h_i
$$
- 第二种切分方法:重要性切分,左侧长方形更窄,右侧更宽
$$
S=\sum _{i=0}^N x_i \times h_i
$$
三角形切被分为一个个长方形,长方形的面积代表贡献。很显然,左侧的长方形高度越高,相同宽度面积越大,贡献越多。也就是说,相同的x轴变化,左侧部分对积分的影响越明显,越高频
能看出(在同等误差下)重要性采样所需要的采样次数比均匀采样要小
重要性采样的思想就是,在高频处我们进行更多次的采样,低频处进行更少的采样,最后根据权重合并,就能在采样次数比较少的情况下,得到最精确的积分值
- 高度函数$h_i$就是采样值
- 宽度函数$x_i$就是重要性权重
- 面积$S$就是在当前概率分布下的采样期望
概率密度函数
详情可以去看概率论
在上一步,我们将连续函数的积分,转化为离散的采样值 x 重要性权重,然后我们发现,这个重要性权重怎么求?
还是上面的三角形,我们发现横坐标可以取[0, r]中任意值(r为三角形边长)
因此具体到某个点(随机变量),被取到的概率为$\frac{\mathrm{d}x}{r}$(这里其实不怎么精确,概率论中点取到的概率为0,这里实际上是一段很小的区域被取到的概率)
对于一个区域[a, b],我们进行积分,得到随机变量取到该区域的概率P
$$
P(a < X \le b)=F(b)-F(a)=\int_a^b \frac{1}{r}\mathrm{d}x=\frac{b-a}{r}
$$
-
分布函数:$F(x)$
-
概率密度函数:$1/r$,我们用$p(x)$表示
-
概率:$P(a < X \le b)$
哦,现在我们知道了这个重要性权重有多大了
$$
x_i=\Delta x/P=1/p(x)
$$
进而我们可以写出这个三角形面积的期望
$$
S=\sum _{i=0}^N x_i \times h_i=\lim {N \rightarrow \infty}\frac{1}{N}\sum{k=1}^{N}\frac{f(x_k)}{p(x)}
$$
不过,值得注意的是,我们上面使用的PDF是均匀的,其实并能很好地加速收敛,实际会使用一个和原函数形状类似的PDF来加速收敛(PDF的选择不会影响最终结果,但是会影响收敛速度)
BRDF生成射线方向
BRDF,双向反射分布函数,用于描述光线进出材质后能量的变化
我们在实现BRDF时,通常会实现以下接口
- eval:给定入射光方向和视线方向,求BRDF值
- sample:生成射线方向
- pdf:返回sample生成的射线的PDF
我们以最简单的phong着色为例
在RTOW中,我们朝着随机半球方向生成向量,该向量就是新射线的方向,同时求出该方向的PDF
我个人理解,射线方向是随机生成的,每个方向出现的可能性相同,但是他们的PDF不同,你可以理解为重要性采样求三角形面积时,每个大长方形是由内部多个(数量相同)等高的小长方形拼成的,但是小长方形的宽度不一致,1/PDF就是小长方形的宽度。越重要的地方,长方形宽度越小,越密集,于是实现了重要性采样
virtual bool scatter( |
上面生成新射线方向时,使用法线+球面向量,最后的形状就类似下图红色
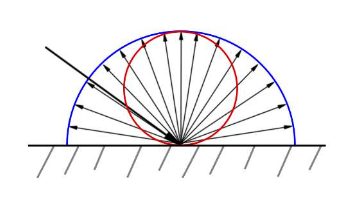
还清除了朝下(射向材质内部的)的射线
随机数
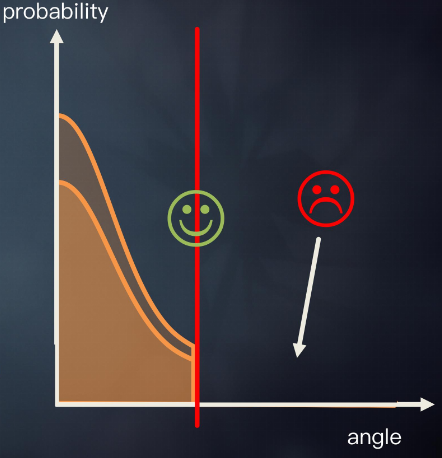
作者使用了Halton Sequences生成随机数,并引入了截断,角度有最大值,这样能减弱BRDF的长尾巴(Tail)对结果的影响(这些尾巴会带来很多噪点)
float2 u = halton(sampleIdx); |
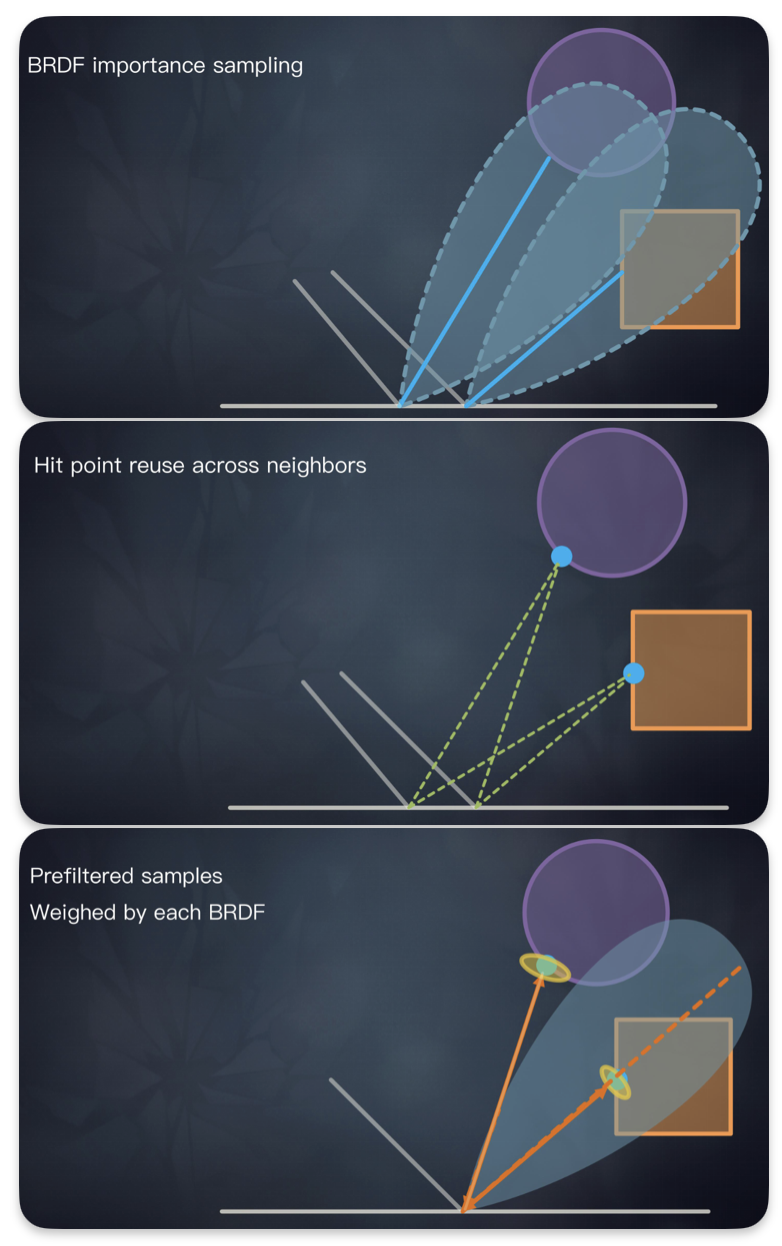
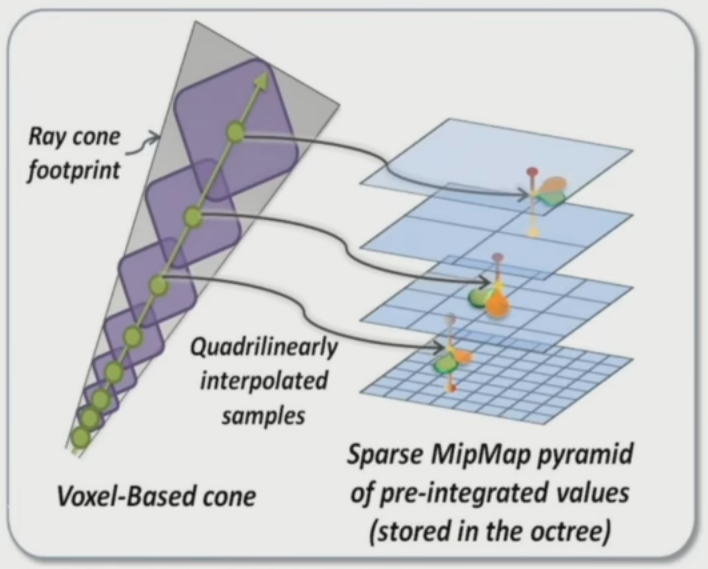
过滤重要性采样
一种基于预计算的光追,我们假设射线是圆锥形,我们可以根据MipMap层级得到滤波结果
复用邻居光线
复用
上面提到glossy ssr会导致严重的噪点问题,即使使用重要性采样,每个像素仍需要大量光线才能得到低噪点的结果
我们注意到,相邻像素,他们的位置相近,可见性应该也是接近的,那么邻居像素朝某方向发射的光线,其实也可以被当前像素复用
当然直接做模糊(比如用高斯滤波)会导致很多光斑,经过很多数学推导和近似后,给出了以下公式
result = 0.0; |
稀疏
受邻居光线的启发,我们完全没必要每个像素都做射线,只需要在低分辨率下某些点做多次射线,其邻居使用这个射线结果就可以
TAA
我们不仅在空间上做射线的复用,也可以在时间上及逆行复用