Pro TBB
在摩尔定律逐渐失效的今日,CPU主频和单核性能提升越来越不明显,为了得到跟高的性能,我们走向了并行计算的道路
概念
并发和并行
TBB基础
TBB(Threading Building Blocks)是一个非常流行的C++并行编程(parallel programming)方案
Mac上安装使用TBB
安装tbb
链接tbb
find_package (TBB REQUIRED)... target_link_libraries (TimeStudy TBB::tbb)
引用头文件
在Ubuntu上安装TBB
$sudo apt-get install libtbb-dev
调用函数
template <typename Func0, [...,] typename FuncN>void parallel_invoke (const Func0& f0, [...,] const FuncN& fN)
一个简单的TBB示例,并行输出两行字符串
通过tbb::parallel_invoke实现任务、函数粒度的并行
#include <iostream> #include <tbb/tbb.h> int main () tbb::parallel_invoke ( [](){std::cout << "TBB!" << std::endl;}, [](){std::cout << "Hello" << std::endl;} ); return 0 ; }
我们这里使用lambda表达式创建了匿名(anonymous)函数,可以大幅简化TBB编写
快排示例
传统快排算法(升序)
在数列中取一个数作为基准数
比基准小的放在基准左边,大的放在右边
对左右两边分别快排,直到只剩一个数(左右重合)
能看出,这个算法采用了分治的思想,很适合并行
#include <iostream> #include <vector> #include <tbb/tbb.h> using QV = std::vector<int >;void quickSort (QV::iterator left, QV::iterator right) if (left >= right){ return ; } int pivot_value = *left; QV::iterator i = left, j = right - 1 ; while (i != j){ while (i != j && pivot_value < *j) --j; while (i != j && pivot_value >= *i) ++i; std::iter_swap (i, j); } std::iter_swap (left, i); quickSort (left, i); quickSort (j+1 , right); } void parallelQuicksort (QV::iterator left, QV::iterator right) if (left >= right){ return ; } int pivot_value = *left; QV::iterator i = left, j = right - 1 ; while (i != j) { while (i != j && pivot_value < *j) --j; while (i != j && pivot_value >= *i) ++i; std::iter_swap (i, j); } std::iter_swap (left, i); tbb::parallel_invoke ( [=]() { parallelQuicksort (left, i); }, [=]() { parallelQuicksort (i + 1 , right); } ); } void parallelCutoffQuicksort (QV::iterator left, QV::iterator right) const int cutoff = 100 ; if (right - left < cutoff) { quickSort (right, left); } else { int pivot_value = *left; QV::iterator i = left, j = right - 1 ; while (i != j) { while (i != j && pivot_value < *j) --j; while (i != j && pivot_value >= *i) ++i; std::iter_swap (i, j); } std::iter_swap (left, i); tbb::parallel_invoke ( [=]() { parallelQuicksort (left, i); }, [=]() { parallelQuicksort (i + 1 , right); } ); } } int main () std::vector<int > nums; for (int i = 0 ; i < 5000 ; ++i){ nums.push_back (rand () % 5000 ); } tbb::parallel_for (0 , 10 , [](int ) { tbb::tick_count t0 = tbb::tick_count::now (); while ((tbb::tick_count::now () - t0).seconds () < 0.01 ); }); std::vector<int > nums2 = nums; tbb::tick_count t0 = tbb::tick_count::now (); quickSort (nums.begin (), nums.end ()); std::cout << "Normal Time=" << (tbb::tick_count::now () - t0).seconds () << std::endl; tbb::tick_count t1 = tbb::tick_count::now (); parallelQuicksort (nums2.begin (), nums2.end ()); std::cout << "Parallel Time=" << (tbb::tick_count::now () - t1).seconds () << std::endl; return 0 ; }
最后结果,当数组比较大的时候,并行快排速度会更快一点
Normal Time=0.0023285 Parallel Time=0.00110846
此外tbb进行任务分配也会有开销,因此我们往往将大任务分成若干个小任务后,让小任务串型执行,上文中的cutoff就是起到这个作用,这样往往能得到更高的性能
时刻查询
tbb::tick_count t0 = tbb::tick_count::now (); ... std::cout << "Time: " << (tbb::tick_count::now () - t0).seconds () << " seconds" << std::endl;
并行开发中动态内存管理十分复杂、危险(内存泄漏),这里推荐使用C++11的智能指针(自带GC)
Flow Graph
将函数执行制作成Graph,实现消息驱动的并行(有些类似FrameGraph)
void fig1_10 (const std::vector<ImagePtr>& image_vector) const double tint_array[] = {0.75 , 0 , 0 }; tbb::flow::graph g; int i = 0 ; tbb::flow::input_node<ImagePtr> src (g, [&i, &image_vector](tbb::flow_control &fc) -> ImagePtr { if (i < image_vector.size()){ return image_vector[i++]; } else { fc.stop(); return {}; } }) tbb::flow::function_node<ImagePtr, ImagePtr> gamma (g, tbb::flow::unlimited, [] (ImagePtr img) -> ImagePtr{ return applyGamma(img, 1.4 ); } ) tbb::flow::function_node<ImagePtr, ImagePtr> tint (g, tbb::flow::unlimited, [tint_array] (ImagePtr img) -> ImagePtr{ return applyTint(img, tint_array); } ) tbb::flow::function_node<ImagePtr> write (g, tbb::flow::unlimited, [] (ImagePtr img){ writeImage(img); } ) tbb::flow::make_edge (src, gamma); tbb::flow::make_edge (gamma, tint); tbb::flow::make_edge (tint, write); src.activate (); g.wait_for_all (); }
最后该程序会以流水线 的形式执行,当第一张图片完成gamma矫正,去执行tint着色时,第二张图片开始执行gamma矫正(每张图片间互不影响)
相比于TimeStudy的串型执行,流水线执行效率会更快
循环
template <typename Index, typename Func>Func parallel_for (Index frist, Index last, [Index step,] const Func& f) ;
上面的代码,我们将图片处理切分为几个小块,但小块内部仍然是单线程
我们注意到,在图片处理时,有一个很大的循环在遍历图片上的像素点,那么能不能并行做这件事?
我们并行处理每一行
tbb::parallel_for (0 , height, [&in_rows, &out_rows, width, gamma](int i){ for (int j = 0 ; j < width; ++j){ const ImageLib::Image::Pixel& p = in_rows[i][j]; double v = 0.3 * p.bgra[2 ] + 0.59 * p.bgra[1 ] + 0.11 * p.bgra[0 ]; double res = pow (v, gamma); if (res > ImageLib::MAX_BGR_VALUE){ res = ImageLib::MAX_BGR_VALUE; } out_rows[i][j] = ImageLib::Image::Pixel (res, res, res); } } );
tbb::parallel_for (0 , height, [&in_rows, &out_rows, width, tints](int i){ for (int j = 0 ; j < width; ++j){ const ImageLib::Image::Pixel& p = in_rows[i][j]; std::uint8_t b = (double )p.bgra[0 ] + (ImageLib::MAX_BGR_VALUE - p.bgra[0 ]) * tints[0 ]; std::uint8_t g = (double )p.bgra[0 ] + (ImageLib::MAX_BGR_VALUE - p.bgra[1 ]) * tints[1 ]; std::uint8_t r = (double )p.bgra[0 ] + (ImageLib::MAX_BGR_VALUE - p.bgra[2 ]) * tints[2 ]; out_rows[i][j] = ImageLib::Image::Pixel ( (b > ImageLib::MAX_BGR_VALUE) ? ImageLib::MAX_BGR_VALUE : b, (g > ImageLib::MAX_BGR_VALUE) ? ImageLib::MAX_BGR_VALUE : g, (r > ImageLib::MAX_BGR_VALUE) ? ImageLib::MAX_BGR_VALUE : r ); } } );
M1 Mac Xcode Clang至今不支持C++17的std::execution,对OpenMP的支持也相当差
归约
template <typename Range, typename Value, typename Func, typename Reduction>Value parallel_reduce (const Range& range, const Value& identity, const Func& func, const Reduction& reduction) ;
树形规约
求最大值
下面是一个vector求最大值的示例,实现机制就是将整个数组分成一个个小块(chunks),分别对小块求最值,然后将小块归约(reduce),最后求得最值(形成了一个树型结构)
int pmax (const std::vector<int > &arr) int max_value = tbb::parallel_reduce ( tbb::blocked_range <int >(0 , arr.size ()), std::numeric_limits<int >::min (), [&](const tbb::blocked_range<int > &r, int init) -> int { for (int i = r.begin (); i != r.end (); ++i){ init = std::max (init, arr[i]); } return init; }, [](int x, int y) -> int { return std::max (x, y); } ); return max_value; }
下面这是一个求PI的示例
double calcPI (int degree) double dx = 1.0 / degree; double sum = tbb::parallel_reduce ( tbb::blocked_range <int >(0 , degree), 0.0 , [=](const tbb::blocked_range<int > &r, double init) -> double { for (int i = r.begin (); i != r.end (); ++i){ double x = (i + 0.5 )*dx; double h = std::sqrt (1 - x*x); init += h * dx; } return init; }, [](double x, double y) -> double { return x+y; } ); return 4 * sum; }
扫描
template <typename Range, typename Value, typename Scan, typename Combine>Value parallel_scan (const Range& range, const Value& identity, const Scan& scan, const Combine& combine) ;
前缀和
前缀和在图形领域也有很大的用处
对于一个数组,我们将其分为三个小块ABC
A.init=0, B.init=0 scan(A), scan(B) B.init = A.ans C.init = A.ans + B.ans scan(B), scan(C)
最后我们只用了串行2/3的扫描时间,但是多做了1/3的扫描工作,时间减少了,但是工作量变大了
int parallelPrefix (const std::vector<int > &v, std::vector<int > &psum) int N = v.size (); psum[0 ] = v[0 ]; int final_sum = tbb::parallel_scan ( tbb::blocked_range <int >(1 , N), (int )0 , [&v, &psum](const tbb::blocked_range<int > &r, int sum, bool is_final_scan) -> int { for (int i = r.begin (); i < r.end (); ++i){ sum += v[i]; if (is_final_scan){ psum[i] = sum; } } return sum; }, [](int x, int y){ return x+y; } ); return final_sum; }
可见性
如图,等间距摆放一个个薄板(厚度忽略不计),从最右上角向左看,能看到哪些薄板?
解题的本质就是比较夹角大小,只要夹角一直递增,就能看到
void visibility (const std::vector<double > &heights, std::vector<bool > & visible, double dx) const int N = heights.size (); double max_angle = std::atan2 (dx, heights[0 ] - heights[1 ]); double final_max_angle = tbb::parallel_scan ( tbb::blocked_range <int >(1 , N), 0.0 , [&heights, &visible, dx](const tbb::blocked_range<int > &r, double max_angle, bool is_final_scan) -> double { for (int i = r.begin (); i != r.end (); ++i){ double my_angle = atan2 (i * dx, heights[0 ] - heights[i]); if (my_angle >= max_angle){ max_angle = my_angle; } else if (is_final_scan){ visible[i] = false ; } } return max_angle; }, [](double a, double b){ return std::max (a, b); } ); }
parallel_for_each
parallel_for在使用时必须指定range,但如果要处理的item数量不确定(比如在执行过程中修改itemList),那么就不能使用,这个时候我们可以使用parallel_for_each
template <typaname InputIterator, typename Body>void parallel_for_each ( InputIterator first, InputIterator last, Body body )
下面是一个遍历树的示例,若一个节点的v.first为prime,将其v.second修改为true。我们不知道树有多大,于是采用递归遍历
void f (PrimesTreeElement::Ptr root) PrimesTreeElement::Ptr tree_arry[] = {root}; tbb::parallel_for_each ( tree_array, [](PrimesTreeElement::Ptr e, tbb::feeder<PrimesTreeElement::Ptr>& feeder){ if (e){ if (isPrime (e->v.first)) e->v.second = true ; if (e->left) feeder.add (e->left); if (e->right) feeder.add (e->right); } } ); }
前向替换
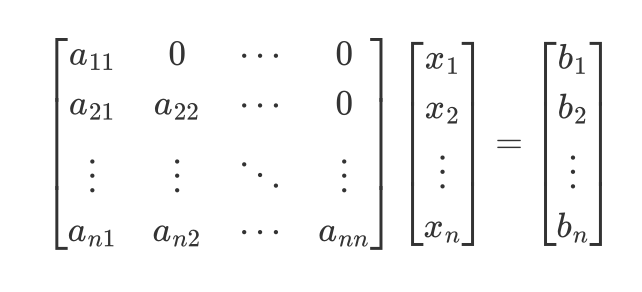
前向替换(Forward Substitution)是线性代数中一种求解线性方程组的方法
一般解线性方程组有两种方法:
高斯消元法:初中就学了,就是两个方程变化后相加减(也可以换元),消除变量,直到得到解。这个方法可以拓展到矩阵中,就是把线性方程转化为行阶梯矩阵(中间那个矩阵),然后简化为简化行阶梯矩阵(右边那个矩阵)
$$
前向替换法就是得到行阶梯矩阵后
能写出以下式子
$$
于是我们只需要从第一个式子开始,逐步向下替换,就能求出方程的解
如果是下三角矩阵,那就是后向替换
void serialFS (std::vector<double >& x, const std::vector<double >& a, std::vector<double >& b) const int N = x.size (); for (int i = 0 ; i < N; ++i) { for (int j = 0 ; j < i; ++j) { b[i] -= a[j + i*N] * x[j]; } x[i] = b[i] / a[i + i*N]; } }
加入分块和并行后:
void parallelFS (std::vector<double > &x, const std::vector<double > &a, std::vector<double > &b) const int N = x.size (); const int block_size = 512 ; const int num_blocks = N / block_size; std::vector<std::atomic<char >> ref_count (num_blocks * num_blocks); for (int r = 0 ; r < num_blocks; ++r) { for (int c = 0 ; c <= r; ++c) { if (r == 0 && c == 0 ) ref_count[r * num_blocks + c] = 0 ; else if (c == 0 || r == c) ref_count[r * num_blocks + c] = 1 ; else ref_count[r * num_blocks + c] = 2 ; } } using BlockIndex = std::pair<size_t , size_t >; BlockIndex top_left (0 , 0 ) ; tbb::parallel_for_each (&top_left, &top_left + 1 , [&](const BlockIndex &bi, tbb::feeder<BlockIndex> &feeder) { size_t r = bi.first; size_t c = bi.second; int i_start = r * block_size, i_end = i_start + block_size; int j_start = c * block_size, j_max = j_start + block_size - 1 ; for (int i = i_start; i < i_end; ++i) { int j_end = (i <= j_max) ? i : j_max + 1 ; for (int j = j_start; j < j_end; ++j) { b[i] -= a[j + i * N] * x[j]; } if (j_end == i) { x[i] = b[i] / a[i + i * N]; } } if (c + 1 <= r && --ref_count[r * num_blocks + c + 1 ] == 0 ) { feeder.add (BlockIndex (r, c + 1 )); } if (r + 1 < (size_t ) num_blocks && --ref_count[(r + 1 ) * num_blocks + c] == 0 ) { feeder.add (BlockIndex (r + 1 , c)); } } ); }
流水线
void parallel_pipeline ( size_t max_number_of_live_tokens, const filter<void ,void >& filter_chain ) template <typename T, typename U, typename Func>filter_t <T, U> make_filter (filter::mode mode, const Func& f)
管线(pipeline)是过滤器(filters)的线性序列,物体(items)在通过过滤器时,会被处理
void fig_2_27 (int num_tokens, std::ofstream &caseBeforeFile, std::ofstream &caseAfterFile) tbb::parallel_pipeline ( num_tokens, tbb::make_filter <void , CaseStringPtr>( tbb::filter_mode::serial_in_order, [&](tbb::flow_control &fc) -> CaseStringPtr { CaseStringPtr s_ptr = getCaseString (caseBeforeFile); if (!s_ptr) fc.stop (); return s_ptr; }) & tbb::make_filter <CaseStringPtr, CaseStringPtr>( tbb::filter_mode::parallel, [](CaseStringPtr s_ptr) -> CaseStringPtr { std::transform (s_ptr->begin (), s_ptr->end (), s_ptr->begin (), [](char c) -> char { if (std::islower (c)) return std::toupper (c); else if (std::isupper (c)) return std::tolower (c); else return c; }); return s_ptr; }) & tbb::make_filter <CaseStringPtr, void >( tbb::filter_mode::serial_in_order, [&](CaseStringPtr s_ptr) -> void { writeCaseString (caseAfterFile, s_ptr); }) ); }
Flow Graphs
并行编程另一个问题是混乱,传统并行编程为了避免程序混乱(messy),我们需要事无巨细地管理每一件事。但在上一节简单提到的Flow Graphs,提供了一个简单的管理方法
Flow Graphs允许我们用图(DAG)来描述程序,相比于parallel_do和parallel_pipeline,FlowGraphs自由度更高,推荐使用。
每个节点是一个并行函数,箭头代表数据的流向/消息传递,我们将这个图称为数据流向图(data flow graphs)
图也可以描述操作的前后顺序,进而可以构建一些传统方法难以表示的独立结构体,这种图被称为依赖图(dependency graphs)
预热
static void warmupTBB () tbb::parallel_for (0 , tbb::this_task_arena::max_concurrency (), [](int ) { tbb::tick_count t0 = tbb::tick_count::now (); while ((tbb::tick_count::now () - t0).seconds () < 0.01 ); }); }
无论是web服务器、CPU/GPU并行计算,深度学习,都有warmup的概念
对于一个项目,如果采用冷启动的方式,从零瞬间增加计算量,可能会把系统压垮,于是我们可以使用warmup,逐步提高项目负荷。
数据流图
构建图对象
创建节点,填充节点信息
链接节点
发送消息
等待图完成
void graphSample () tbb::flow::graph g; tbb::flow::function_node<int , std::string> my_first_node ( g, tbb::flow::unlimited, [](const int &in) -> std::string{ std::cout << "first node received: " << in << std::endl; return std::to_string(in); } ) tbb::flow::function_node<std::string> my_second_node ( g, tbb::flow::unlimited, [](const std::string &in){ std::cout << "second node received: " << in << std::endl; } ) tbb::flow::make_edge (my_first_node, my_second_node); my_first_node.try_put (10 ); g.wait_for_all (); }
节点
Flow Graphs有三种节点
functional
control flow
buffering
function_node
template <typename Body>function_node (graph& g, size_t concurrency, Body body)
函数节点,当消息传递到该节点,会被函数处理,并将输出值传递给后继者
tbb::flow::function_node<int , std::string> my_first_node ( g, tbb::flow::unlimited, [](const int &in) -> std::string{ std::cout << "first node received: " << in << std::endl; return std::to_string(in); } )
函数节点可以从他所连接(edges)其他节点获取消息,也可以使用try_put手动向其传递消息
join_node
template <typename Body, typename ... Bodies>join_node (graph&, Body, Bodies...)->join_node<std::tuple<std::decay_t <input_t <Body>>, std::decay_t <input_t <Bodies>>...>, key_matching<output_t <Body>>>;
流控制节点,当消息传递到该节点,会创建一个消息元组(tuple),然后将元组广播给所有后继者
tbb::flow::function_node<int , std::string> my_node{...}; tbb::flow::function_node<int , double > my_other_node{...}; tbb::flow::join_node<std::tuple<std::string, double >, tbb::flow::queueing> my_join_node{g}; tbb::flow::function_node<std::tuple<std::string, double >, int > my_final_node{g, tbb::flow::unlimited, [](const std::tuple<std::string, double >& in) -> int { std::cout << "final: " << std::get <0 >(in) << " and " << std::get <1 >(in) << std::endl; return 0 ; } };
有的时候,我们需要保证join_node的输入的对应的。比如我想将两张照片拼成一张,我开两个节点并行读项目,再用join_node整合后传入merge函数节点,然而在这个过程中,我必须保证传入的两个像素点在同一位置,为此,我们可以添加一个frameNumber做标记(tags)
tbb::flow::join_node<std::tuple<Image, Image>, tbb::flow::tag_matching > join_images_node (g, [] (Image left) { return left.frameNumber; }, [] (Image right) { return right.frameNumber; } ); ... tbb::flow::make_edge (increase_left_node, tbb::flow::input_port <0 >(join_images_node)); tbb::flow::make_edge (increase_right_node, tbb::flow::input_port <1 >(join_images_node)); tbb::flow::make_edge (join_images_node, merge_images_node);
链接
template <typename Message> inline void make_edge ( sender<Message> &p, receiver<Message> &s ) ;template < typename MultiOutputNode, typename MultiInputNode > inline void make_edge ( MultiOutputNode& output, MultiInputNode& input ) ;
我们可以使用make_edge链接两个节点
make_edge (my_node, tbb::flow::input_port <0 >(my_join_node));make_edge (my_other_node, tbb::flow::input_port <1 >(my_join_node));make_edge (my_join_node, my_final_node);
激活
为了激活图,我们需要向图中传递消息,除了前文的try_put,我们也可以使用input_port
等待
性能限制
Flow Graphs是一个基于Task的并行框架,当消息到达一个节点时,根据节点的并发限制,创建Task。生成的Task会进一步映射为线程(跟上一节讲的循环、算法的机制一样)
真正限制Flow Graphs性能的有
串行节点(serial node)
工作线程数
任务复杂度
依赖图
很像RenderGraph
数据流向图
依赖图
Edges含义
表示数据流向
表示节点的先后顺序
信息传递方式
消息
shared memory
节点类型
function_node
continue_node
节点的先后顺序,描述的是依赖关系,只有前面节点执行结束后,后面节点才能安全、正确地执行
依赖图不使用函数节点,而是继续节点continue_node,节点间的消息传递使用,当传入continue_node的消息(continue_msg)数量等于该节点需要的消息数量,节点内的函数会开始执行
continue_node只关心传入的消息数量,不关心消息源。这导致依赖图必须是非循环的(acyclic),因为一个物体循环发出两次消息,(在这里)等同于两个物体各发出一次消息
构建依赖图
创建图对象
创建节点
链接
发送信息
等待图完成
前向替换
之前我们使用parallel_for_each实现了一份前向替换,我们现在用依赖图再实现一次
经观察,我们发现辅对角线的块/迭代器是相互独立的,他们之间没有依赖关系(上图(b),块BC间没有依赖,他们只需要在A之后执行就可以正确运算)
经观察,同时并行计算的最大块数为辅对角线的长度,也就是图中标注的 a set of independent blocks
经观察,上图(b)中每一个块需要接受两个msg,正好与block_sizes大小相等
using Node = tbb::flow::continue_node<tbb::flow::continue_msg>;using NodePtr = std::shared_ptr<Node>;NodePtr createNode (tbb::flow::graph &g, int r, int c, int block_size, std::vector<double > &x, const std::vector<double > &a, std::vector<double > &b) void addEdges (std::vector<NodePtr> &nodes, int r, int c, int block_size, int num_blocks) void dependencyGraphFS (std::vector<double > &x, const std::vector<double > &a, std::vector<double > &b) const int N = x.size (); const int block_size = 1024 ; const int num_blocks = N / block_size; std::vector<NodePtr> nodes (num_blocks * num_blocks) ; tbb::flow::graph g; for (int r = num_blocks-1 ; r >= 0 ; --r){ for (int c = r; c >= 0 ; --c){ nodes[r * num_blocks + c] = createNode (g, r, c, block_size, x, a, b); addEdges (nodes, r, c, block_size, num_blocks); } } nodes[0 ]->try_put (tbb::flow::continue_msg ()); g.wait_for_all (); } NodePtr createNode (tbb::flow::graph &g, int r, int c, int block_size, std::vector<double > &x, const std::vector<double > &a, std::vector<double > &b) const int N = x.size (); return std::make_shared <Node>( g, [r, c, block_size, N, &x, &a, &b](const tbb::flow::continue_msg & msg){ int i_start = r * block_size, i_end = i_start + block_size; int j_start = c * block_size, j_max = j_start + block_size -1 ; for (int i = i_start; i < i_end; ++i){ int j_end = (i <= j_max) ? i : j_max+1 ; for (int j = j_start; j < j_end; ++j){ b[i] -= a[j + i*N] * x[j]; } if (j_end == i){ x[i] = b[i] / a[i + i*N]; } } return msg; } ); } void addEdges (std::vector<NodePtr> &nodes, int r, int c, int block_size, int num_blocks) NodePtr np = nodes[r * num_blocks + c]; if (c + 1 < num_blocks && r != c){ tbb::flow::make_edge (*np, *nodes[r * num_blocks + c + 1 ]); } if (r + 1 < num_blocks){ tbb::flow::make_edge (*np, *nodes[(r+1 ) * num_blocks + c]); } }
PSTL
parallel_sort
同步
在并行编程中,我们要极力避免同步(Synchronization)和互斥(exclusion),这会严重影响性能
但是很多情况下,我们不得不同步,书中称其为“必要之恶”(necessary evil)
写冲突
比如我们想要统计一张图中各种颜色出现的次数,如果是串行处理,我们就遍历每一个像素,用一个数组存储统计值
for (int i = 0 ; i < N; ++i){ hist[image[i]]++; }
但当我们想要并行处理遍历像素时,就会出现问题。如果两个线程同时读到了同一种颜色,于是都想执行hist[p]++,而如果该操作不支持原子(atomic)操作,就会出现写冲突
RMW
现代操作系统将很多操作设置为原子操作,该操作被视为一个完成的操作,不可分割,因此是线程安全的。比如对齐读(Aligned Read),对齐写(Aligned Write)
原子的本意就是不可分割的意思,当年化学家和物理学家认为原子是最小的粒子(尽管并非如此)
Read-Modify-Write(RMW)设计原则,可以让复杂操作原子化,当多个线程想要对某个内存进行修改时,保证线程安全并只执行一次
windows原子操作的实现原理(_InterlockedIncrement)
读内存
计算得到新值
若内存位置仍然是原始值,则将新值写入该内存位置
锁
解决并行写冲突最简单的方法就是加锁,我们给对象加一个互斥锁(mutex),写之前上锁,写完解锁,其他线程无法操作锁住的对象。而上锁解锁操作中间的代码被称为临界区(critical section),是被锁保护的部分。
锁会影响性能
tbb::global_control global_limit (tbb::global_control::max_allowed_parallelism, nth) ;using my_mutex_t =tbb::spin_mutex;my_mutex_t my_mutex;std::vector<int > hist_p (num_bins) ;parallel_for (tbb::blocked_range<size_t >{0 , image.size ()}, [&](const tbb::blocked_range<size_t >& r) { my_mutex_t ::scoped_lock my_lock{my_mutex}; for (size_t i = r.begin (); i < r.end (); ++i) hist_p[image[i]]++; });
原子操作
锁过于消耗性能,原子操作效果会好一些,只不过这样还是比线性慢,而且不是真共享(Sharing)
什么是原子?原子的原意就是不可分割的基本粒子,我们在实现a++时,本质是分了三步
取a
加法运算
写a
由于并行计算,其他线程可能在你完整完成这三步期间进行操作,于是就会出现冲突。而原子操作就是将这三步视为一步,不可分割,在完整完成这三部之前,其他线程无权访问,等到操作结束
std::vector<std::atomic<int >> hist_p2 (num_bins); parallel_for (tbb::blocked_range<size_t >{0 , image.size ()}, [&](const tbb::blocked_range<size_t >& r) { for (size_t i = r.begin (); i < r.end (); ++i) { hist_p2[image[i]]++; } } );
Thread Local Storage
一个较好的解决方案是私有化(Privatization)和归并(Reduction)
我感觉这个的设计理念就是:如果不得不同步,那就尽可能让更多更复杂的计算并行执行,最后对统一、规范、简单的数据进行同步
前面并行统计Image像素信息时,会出现多个线程写冲突。但如果让每个线程都有一个Image副本,线程对自己的副本进行操作(私有化),最后将这些副本进行归并。
私有化确实不会出现写冲突了,尽管归并仍然存在同步问题,但这个归并更简单,毕竟归并几个数,远远比处理几个线程冲突要简单,性能开销小
TBB提供了多种私有化+归并的的方案,其中归并模板(parallel_reduce)在TBB基础时就讲了
Thread Local Storage(TLS):让每一个线程拥有一份副本,只不过存储开销过大,不宜过多使用
enumerable_thread_specific(ETS)
combinable
ETS
tbb::enumerable_thread_specific<T>对象是一个大容器,容器内包含者每一个线程所对应的副本,我们可以使用迭代器进行访问
using vector_t = std::vector<int >;using priv_h_t = tbb::enumerable_thread_specific<vector_t >;priv_h_t priv_h{num_bins};parallel_for (tbb::blocked_range<size_t >{0 , image.size ()}, [&](const tbb::blocked_range<size_t >& r) { priv_h_t ::reference my_hist = priv_h.local (); for (size_t i = r.begin (); i < r.end (); ++i){ my_hist[image[i]]++; } }); vector_t hist_p3 (num_bins) for (auto i=priv_h.begin (); i!=priv_h.end (); ++i){ for (int j=0 ; j<num_bins; ++j) { hist_p3[j]+=(*i)[j]; } }
使用STL算法替代循环,进行归并
for (auto & i: priv_h) { std::transform (hist_p3.begin (), hist_p3.end (), i.begin (), hist_p3.begin (), std::plus <int >() ); }
由于归并过于常用,TBB也对归并做了封装
priv_h.combine_each ([&](vector_t i){ std::transform (hist_p3.begin (), hist_p3.end (), i.begin (), hist_p3.begin (), std::plus <int >() ); }); vector_t hist_p = priv_h.combine ([](vector_t a, vector_t b) -> vector_t { std::transform (a.begin (), a.end (), b.begin (), a.begin (), std::plus <int >() ); return a; });
combinable
combinable<T>对象也是一个容器,每一个线程对应一个instance
但是与ETS不同,combinable<T>并不能使用迭代器访问,这样设计的目的是不向外暴露对象,这样归并结束后大容器和其中的数据都释放了,以此节省局部空间
tbb::combinable<vector_t > priv_h2{[num_bins](){return vector_t (num_bins);}}; parallel_for (tbb::blocked_range<size_t >{0 , image.size ()}, [&](const tbb::blocked_range<size_t >& r) { vector_t & my_hist = priv_h2.local (); for (size_t i = r.begin (); i < r.end (); ++i) my_hist[image[i]]++; }); vector_t hist_p4 (num_bins) priv_h2.combine_each ([&](vector_t i) { std::transform (hist_p4.begin (), hist_p4.end (), i.begin (), hist_p4.begin (), std::plus <int >() ); });
最终性能比较,能看出TLS能大幅提高性能
Serial: 0.399203 Parallel: 2.01466 Atomic: 0.500326 ETC: 0.0348115 combinable: 0.0339478
parallel_reduce
最简单的归并,还是给用tbb封装好的模板,该算法的本质是树形规约
using image_iterator = std::vector<uint8_t >::iterator;t0 = tbb::tick_count::now (); vector_t hist_p5 = parallel_reduce ( tbb::blocked_range<image_iterator>{image.begin (), image.end ()}, vector_t (num_bins), [](const tbb::blocked_range<image_iterator>& r, vector_t v) { std::for_each(r.begin (), r.end (), [&v](uint8_t i) {v[i]++;}); return v; }, [num_bins](vector_t a, const vector_t & b) -> vector_t { for (int i=0 ; i<num_bins; ++i) a[i] += b[i]; return a; });
并发容器
在上一节我们遇到了同步问题,处理同步会大幅降低性能,为此我们使用了TLS等方法实现了高效的显式同步,而这一节,我们将介绍TBB的核心,并发(Concurrent)
TBB提供了一些高效、线程安全的并发容器,他们大多是使用细粒度的锁或者无锁设计
细粒度锁:指锁定真正需要锁定的地方(其实还是挺低效的),比如一个数组我们只锁我们需要的某一个元素,其他线程如果不访问我这个元素,就能正常并行
无锁:有的线程负责操作,有的线程负责纠错
TBB的并发容器并发性能很好,但串行性能不如STL
顺序表(Sequences)
队列(Queues)
concurrent_queueconcurrent_bounded_queueconcurrent_priority_queue
无序关联容器(Unordered associative containers)
concurrent_hash_mapmap/multimapset/multiset
有序关联容器(Ordered associative containers)
map/multimapset/multiset
concurrent_hash_map
template <typename Key, typename T, typename HashCompare = tbb_hash_compare<Key>, typename Allocator = tbb_allocator<std::pair<const Key, T>>> class concurrent_hash_map {..}
这是一个字符串-Int的哈希表
struct MyHashCompare { static size_t hash (const std::string& s) size_t h = 0 ; for (auto &c : s){ h = (h*17 )^c; } return h; } static bool equal (const std::string& x, const std::string& y) return x == y; } }; typedef tbb::concurrent_hash_map<std::string, int , MyHashCompare> StringTable;class Tally {private : StringTable& table; public : Tally (StringTable& table_): table (table_) {} void operator () (const tbb::blocked_range<std::string*> range) const for (std::string* p = range.begin (); p != range.end (); ++p){ StringTable::accessor a; table.insert (a, *p); a->second += 1 ; } } };
int main () StringTable table; tbb::parallel_for ( tbb::blocked_range <std::string*>( Data, Data+N, 1000 ), Tally (table) ); for ( StringTable::iterator i=table.begin (); i!=table.end (); ++i ) printf ("%s %d\n" ,i->first.c_str (),i->second); return 0 ; }
内存分配
内存分配最重要的是正确,TBB提供了一套可拓展的内存分配
现代C++推荐使用智能指针进行内存管理,不推荐使用malloc和new。TBB完全适配所有版本的C++标准,也推荐使用智能指针进行内存分配
TBB动态内存分配的核心是线程内存池(memory pooling by threads),该内存池可以避免内存分配带来的性能下降,也不苛求“避免cache间不必要的数据移动”
TBB还提供了可拓展的缓存对齐,比std::aligned_alloc使用更简单方便。只不过滥用缓存对齐可能会带了巨大的内存浪费
在并行编程中,内存分配的主要问题是:分配器的争用,缓存效果
分配器争用:C++内存分存储在两个位置,堆和栈。传统的非线程分配器只能在单个全局堆中分配和释放内存,这个过程配合锁以实现互斥,很低效
缓存效应:某些操作可能会把缓存中的数据移动到缓存的另一处,这是很无效的行为,要避免
缓存填充(对齐)
用于解决假共享(我们在同步那一节解决了真共享带来的问题)
基于局部性原则,当CPU查询某个数据时:
若cache中没有找到,就会去内存中寻找
找到后会将该数据写入cache(时间局部性,刚刚被引用过的一个内存位置容易再次被引用)
并将其相邻元素也写入cache(空间局部性,一个内存位置被引用,其相邻位置很可能马上被引用)
如上图,CPU访问a时,先去cache去找,如果cache中没有,就会去内存中寻找,找到后将a和相邻的b写入cache的同一行 。但问题出现了,如果当前cache的其他行里,已经有b了呢?
另一个线程也拥有一缓存行,里面存储了b,结果b却被移动到a那一行了,于是这个线程要访问b,又要去内存中找,增加了cache miss。此外多线程中,a那个线程多半是不会用到b的,于是平白做了cache位置的移动。
这个现象被称为假共享(false sharing),a和b并不是共享对象,但是由于他们靠的太近了,以至于在一个缓存行中,其中一个对象的更新,会强制另一个对象更新。
在多线程中,假共享可以通过缓存填充(cache padding)解决。缓存填充,就是在缓存中两个变量中间填充一些没有意义的数据,于是导致这两个变量不会处于同一个缓存行中,于是避免了假共享。
我们还是以统计图片像素为例,我们发现这种方法比直接用原子操作要快一些
struct bin { std::atomic<int > count; uint8_t padding[64 - sizeof (count)]; }; std::vector<bin, tbb::cache_aligned_allocator<bin>> hist_p6 (num_bins); t0 = tbb::tick_count::now (); parallel_for (tbb::blocked_range<size_t >{0 , image.size ()}, [&](const tbb::blocked_range<size_t >& r) { for (size_t i = r.begin (); i < r.end (); ++i) { hist_p6[image[i]].count++; } } );
我们可以用C++特性来创建结构体:
struct bin { alignas (64 ) std::atomic<int > count; };
代理
TBB的TBBmalloc库使用代理方法,可以实现在不同操作系统,不改变代码,只需要配置一些动态库、代理库、环境变量,就可以实现全局替换new、malloc等分配函数,这对跨平台真的很重要
Task调度
Chapter10
资料
Pro TBB
API Document
代码仓库